The Project - From prototype to YARC 1.0
Although my first box did what I expected it to do, it was pretty simple and makeshift and there were certain things that bothered me:
- - It was lacking a easy functionality to set up new destinations without flashing a new program version with the arduino IDE.
- - Additional hardware was needed to implement a „real“ power off function (Pololu switch)
- - And finally: the cable spaghetti and the quickly made arduino shield weren’t really good looking and actually did hurt my engineer soul ;-)
By chance I got aware of the project of Jason Alderman who had built his own reverse geocache without an arduino but with his own hardware design based upon an AVR micro controller. That looked like a challenge..
And thats how YARC was born!
Jasons design had been altered, some features were not needed, others were added. For the actual design I could use the Eagle PCB freeware version as I only needed two layers and a board size of 8x5 cm.
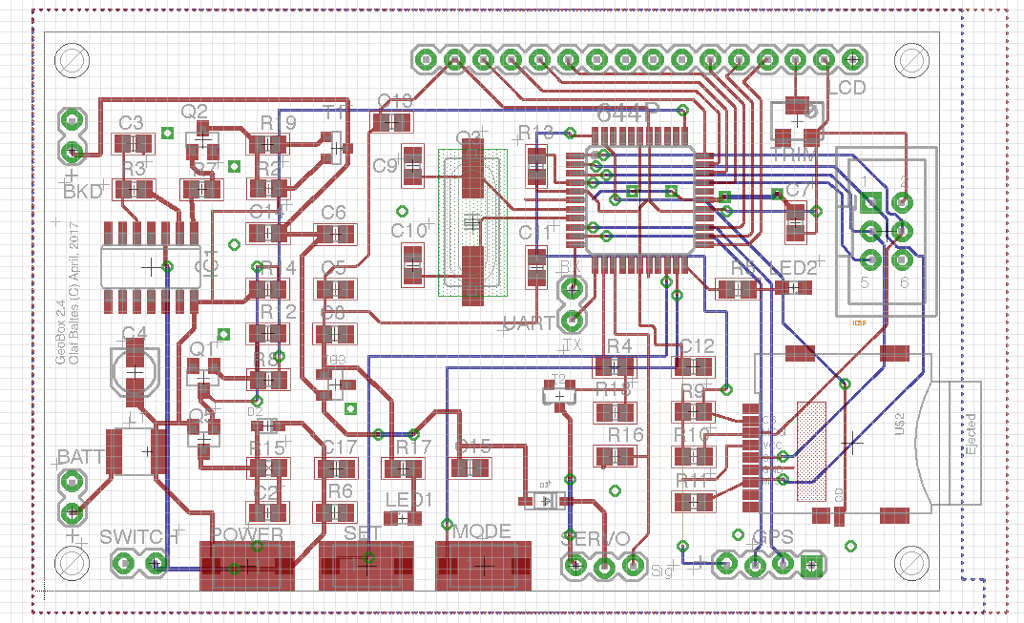
Eagle also generates the so called Gerber files which are needed by the PCB manufacturer to produce the boards. For manufacturing I choose itead, a chinese company which does PCB prototyping for an affordable price and I was highly pleased with the quality.
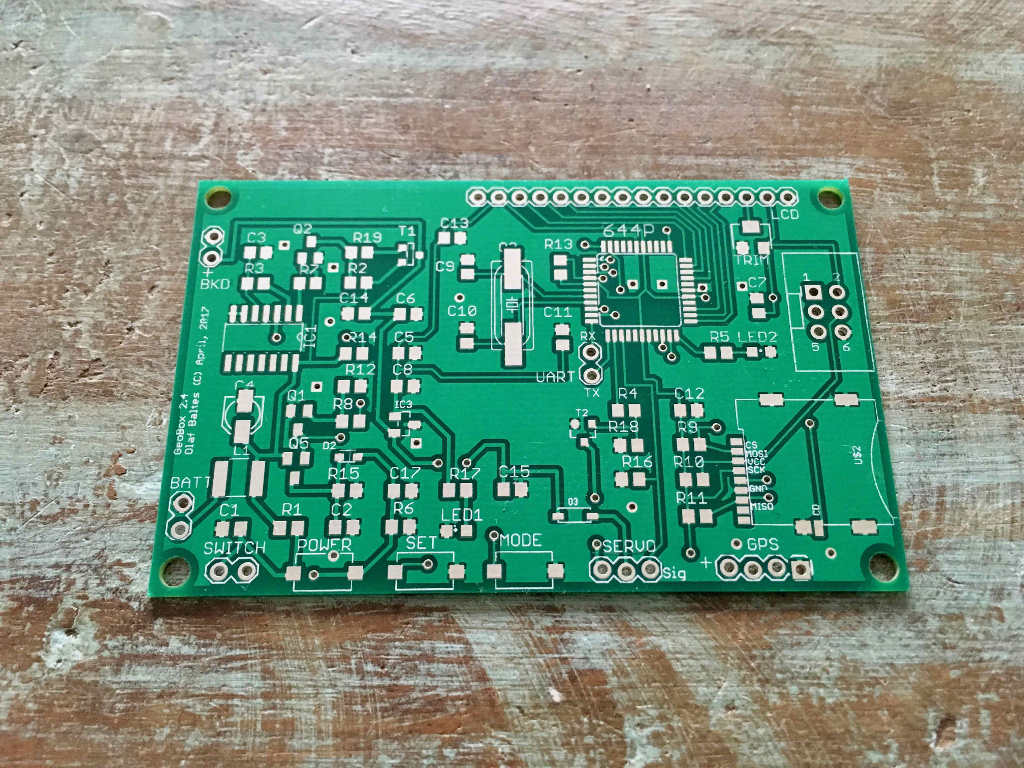
Working with SMD was new to me but actually much easier then expected. However, theres still room for improvement ;-)
As development environment I used Eclipse with the AVR plugin running under Mac OS X
From the AVR development community the following libraries were used:
- Uart and LCD Library from Peter Fleury
- AVR FAT Library from Microcontroller.net
- and the TinyGPS from Mikal Hart
Here the assembled PCB: 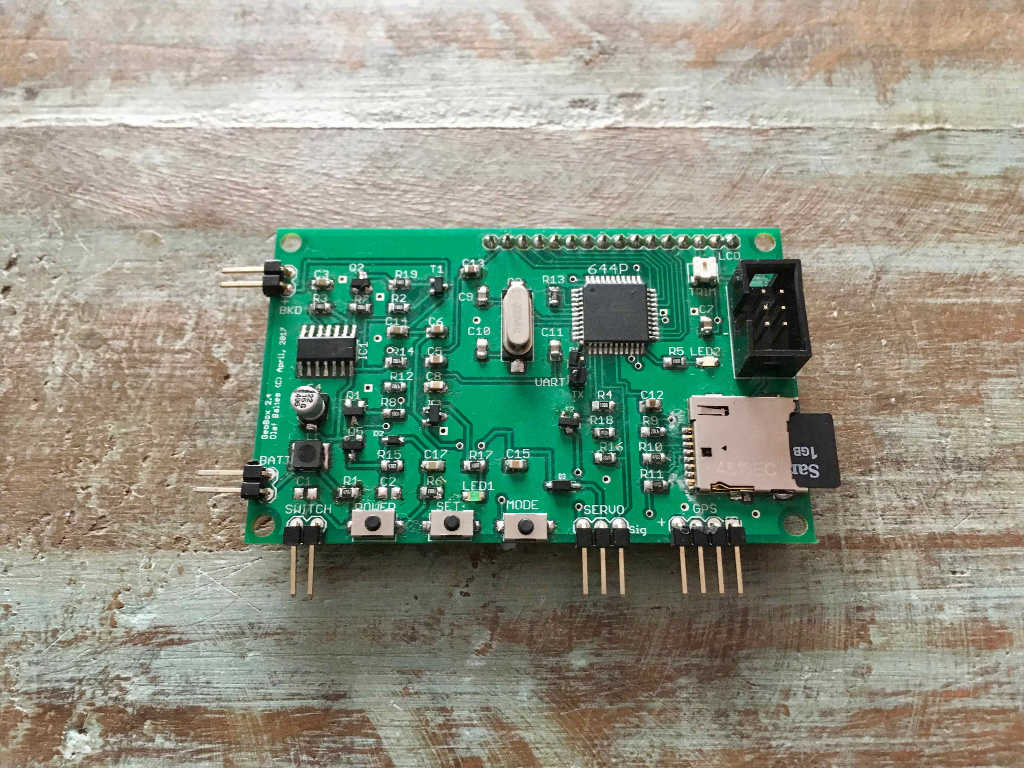
...and a little video showing the servo in action:
From the 3D printer came a holder and a simple locking mechanism for the servo:
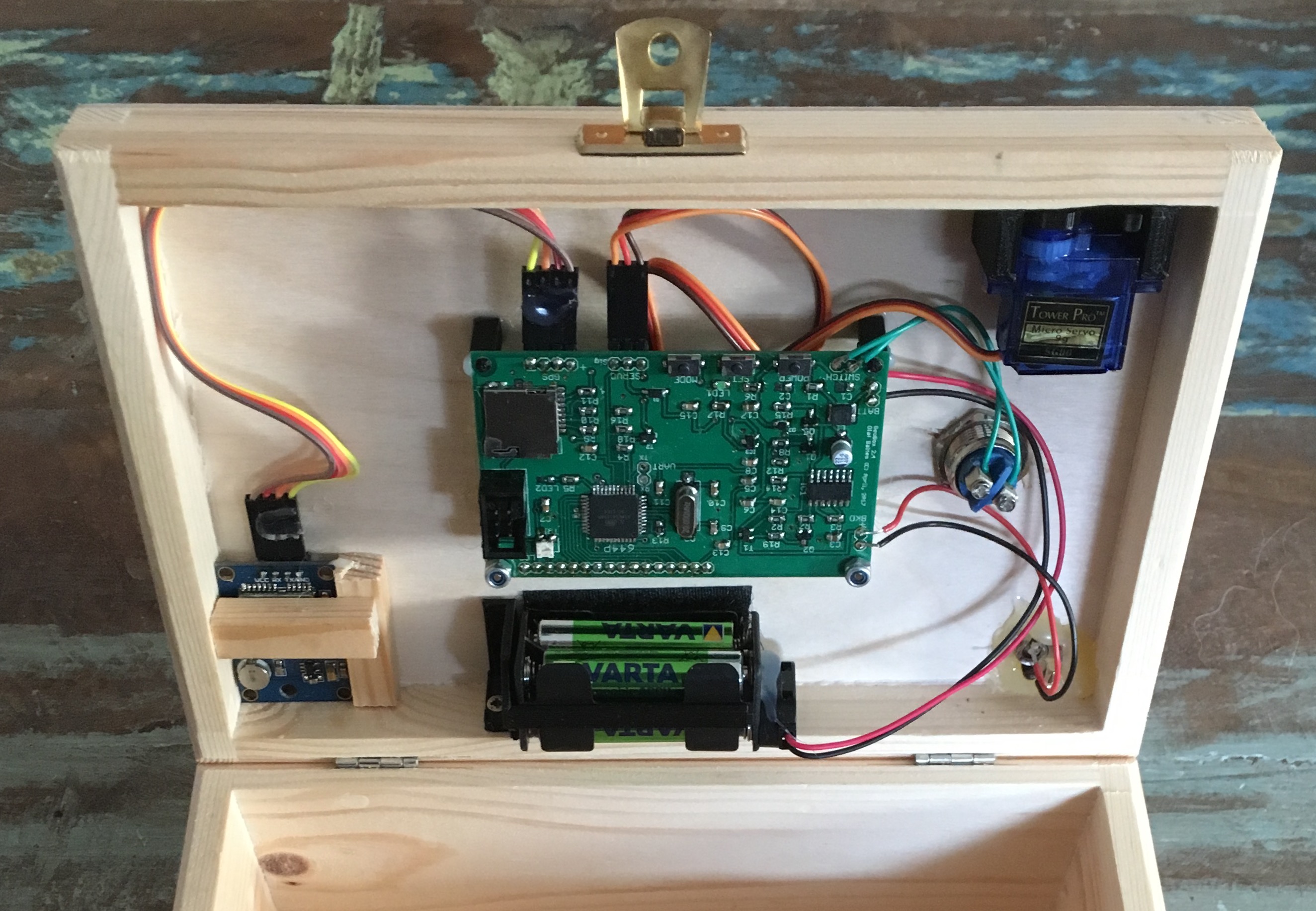
fitted into the lid of a wooden box

... outside view